
by Linh Sún Sun Jul 21, 2013 1:00 pm
» Ảnh cưới anh Dũng
by whatisor Thu Jan 19, 2012 10:45 pm
» [Thông báo] Mở box [Đi Làm]
by trungtq Sun Nov 06, 2011 7:49 am
» Tâm sự của cô Mai
by online107 Wed Sep 28, 2011 9:54 pm
» Du lịch nào! ai đi du lịch ko?
by lemon juice89 Fri Aug 19, 2011 11:07 pm
» BÁN GẤP CĂN HỘ CHÍNH CHỦ Ở SỐ 9, NGÕ 238, TỔ 26, QUẢNG AN, TÂY HỒ, HÀ NỘI
by Hoangvu Tue Aug 02, 2011 5:28 pm
» Công nghệ tạo mẫu nhanh ....
by Hoangvu Tue Aug 02, 2011 5:12 pm
» Google, bing
by whatisor Sun Jun 19, 2011 1:35 pm
» Tiếng Nhật online xu thế mới của thời đại
by tuquynh Fri Jun 03, 2011 10:38 am
» Khai giảng lớp luyện thi N3 tại Trung tâm Nhật Ngữ Top Globis
by tuquynh Fri Jun 03, 2011 10:37 am
» Mu Net2E Thiên giới anh hùng
by phongvuong Mon Mar 21, 2011 3:22 pm
» Chúc mừng năm mới !
by trungtq Sun Jan 23, 2011 3:06 pm
» Merry christmas!!!
by trungtq Sun Dec 26, 2010 10:06 pm
» Liên hoan cuối năm
by trungtq Sun Dec 26, 2010 9:58 pm
» Chuyên đề Robotic
by hungpotter9 Sat Nov 20, 2010 9:45 pm
Không
Số người truy cập cùng lúc nhiều nhất là 28 người, vào ngày Tue Feb 08, 2011 4:30 pm
Chuyen de Robotics
Trang 1 trong tổng số 3 trang • 1, 2, 3 ![]()


bithu:D- Lớp 12

Re: Chuyen de Robotics
by bithu:D Tue Oct 13, 2009 1:44 pm
Được sửa bởi bithu:D ngày Tue Oct 13, 2009 8:45 pm; sửa lần 1.
bithu:D- Lớp 12
Re: Chuyen de Robotics
by trungtq Wed Oct 14, 2009 7:54 pm
trungtq- Admin



whatisor- Lớp 11
Re: Chuyen de Robotics
by bithu:D Sun Oct 18, 2009 11:45 pm
bithu:D- Lớp 12
Re: Chuyen de Robotics
by bithu:D Sun Oct 18, 2009 11:48 pm
bithu:D- Lớp 12
Re: Chuyen de Robotics
by Hoangvu Mon Oct 19, 2009 4:49 pm
http://www.mediafire.com/file/zimiymgdtom/OpenGL.rar
Tớ h mới bắt đầu làm, nói chung là phần tính toán maple chưa biết j cả. Chắc là phải chuyển giao công nghệ thì mới kịp tiến độ được


Hoangvu- Admin

online107- Đại học năm tư

Re: Chuyen de Robotics
by Hoangvu Tue Oct 20, 2009 12:32 am
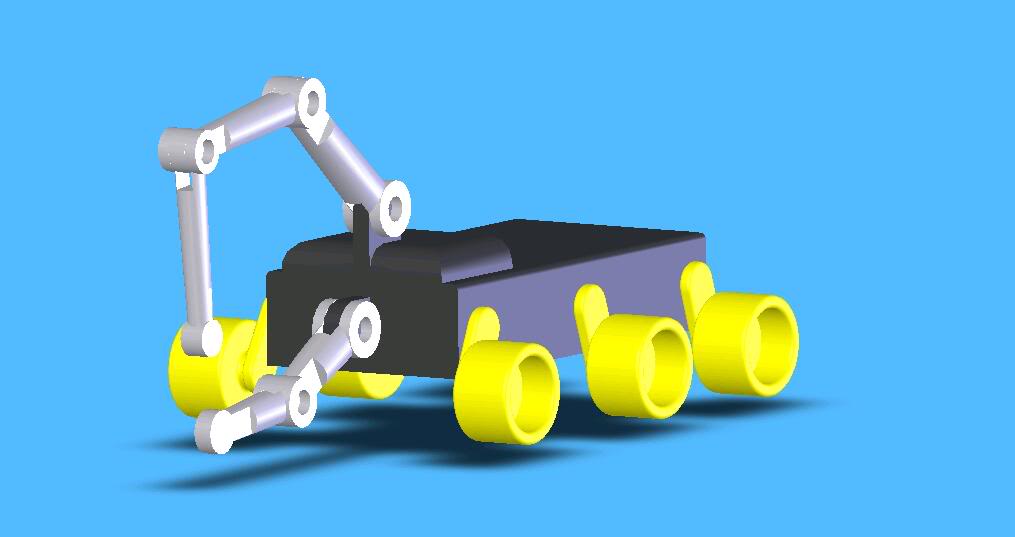
con robot cua tớ đây, mọi người cho ý kiến nhé. Đang k biết làm cái tay thao tác thế nào đây
Hoangvu- Admin
Re: Chuyen de Robotics
by online107 Tue Oct 20, 2009 10:52 am
Con robot trên thiếu một bậc tự do quay rồi.
Như thế kia, khi muôn thao tác sang ngang, nó sẽ phải quay cả tay lẫn người.
online107- Đại học năm tư
Re: Chuyen de Robotics
by online107 Tue Oct 20, 2009 2:44 pm
Do Nam cấp source.
Nhưng sao NewtonRaphson của mình chậm thế nhỉ.
Giải bài toán ngược có 100 hàng mà mất cả nửa tiếng.
test thử thấy newtonRaphson chạy có 4 vòng lặp mà cũng mất 10s.
@Trung Tuan: ak, lam j ma nhung 100 hang??. c thu lay dieu kien dau that gan xem, chac la nhanh hon nhieu day.
online107- Đại học năm tư
whatisor- Lớp 11
Re: Chuyen de Robotics
by online107 Wed Oct 21, 2009 9:01 pm
Chi tiết của tớ dài 2m, đường kính 1.5 m. Hàn một đường từ đầu tới cuối tớ lấy 200 khoảng.
Maple giải mất 1 tiếng.
online107- Đại học năm tư
Re: Chuyen de Robotics
by Hoangvu Wed Oct 21, 2009 10:29 pm
chac la Nam day, k phai Trung beo dauonline107 đã viết:@Trung béo hả??
.
Hoangvu- Admin
Re: Chuyen de Robotics
by online107 Wed Oct 21, 2009 10:44 pm
online107- Đại học năm tư
Re: Chuyen de Robotics
by Hoangvu Wed Oct 21, 2009 10:51 pm
oan em quá, chỗ này vẫn trong phạm vi của mod Nam, y cũng có quyền sửaonline107 đã viết:Viết trong bài của tớ thì chỉ có Trung Béo và Biên thôi, he he.
Hoangvu- Admin
Re: Chuyen de Robotics
by whatisor Thu Oct 22, 2009 11:55 am
Lần sau cậu phải viết TV có dấu
whatisor- Lớp 11
Re: Chuyen de Robotics
by whatisor Thu Oct 22, 2009 11:56 am

whatisor- Lớp 11
Re: Chuyen de Robotics
by online107 Thu Oct 22, 2009 12:41 pm
Của cậu 3 bậc nên có 3 phương trình hả? x, y và phi.
Lúc chọn góc trong ma trận cosin chỉ hướng cần cẩn thận, vì cậu chỉ có một góc phi, hiển nhiên hai góc kia là hằng số, chẳng phụ thuộc vào biến khớp nào, đạo hàm sẽ = 0 hết -> một hàng = 0 -> định thức bằng 0.
online107- Đại học năm tư
Re: Chuyen de Robotics
by whatisor Thu Oct 22, 2009 8:17 pm
Bây giờ chỉ còn 5 bậc, không thấy hàng nào của jacobian bằng 0 nữa nhưng Dịnh thức vẫn bằng không, không biết giải quyết thế nào
Tớ làm 5 phương trình ff :
3 cái cho vị trí
2 cái cho hướng(lấy 2 cái bất kì trong ma trận cosin chỉ hướng)
whatisor- Lớp 11
Re: Chuyen de Robotics
by bithu:D Thu Oct 22, 2009 9:16 pm
bithu:D- Lớp 12
Re: Chuyen de Robotics
by whatisor Thu Oct 22, 2009 9:18 pm
hơ, ẩn số sao bừa được,phải theo DH chứbithu:D đã viết:ak, dinh thuc jacobian bang 0 a,, c biet tai sao ko, tai vi cau chon 6 ptrinh chua doc lap voi nhau chu sao, 6 an so cau chon khong doc lap nhau, phai chon nhu thay giao day ay, ko chon bua dc.[b]
Chỉ bừa cái ff thôi, chọn sao cho có 5 phương trình là được
whatisor- Lớp 11
Re: Chuyen de Robotics
by whatisor Thu Oct 22, 2009 9:19 pm
whatisor- Lớp 11
Re: Chuyen de Robotics
by whatisor Thu Oct 22, 2009 9:42 pm
1.Hàm tính DH:(trong cài hàm tính DH tớ sửa 6 thành 5 rồi nhé, ảnh chưa kịp sửa)
2.Main:
te := Vector(5, [q1, q2, q3, q4, q5]);
d := Vector(5, [.2, 0., 0., 0., 0.]);
a := Vector(5, [.3, .4, .35, .2, .25]);
al := Vector(5, [1.*Pi/(2.), 0., 0., 0., 0.]);
De := Wde(te, d, a, al, 5);
De := combine(De):
> ;
> A := SubMatrix(De, 1 .. 3, 1 .. 3);
P := SubMatrix(De, 1 .. 3, 4);
inputA := Matrix(3, 1, [.8, .3, 0.]);//cái này đúng ra 3x3 tớ chỉ khai bừa 3 cái coi như đầu vào cần dùng cho ff
inputP := Matrix(3, 1, [.5, 1., .5]);//tọa độ
Q := Matrix(5, 1, [q1, q2, q3, q4, q5]);
inputs := Matrix(5, 1, [inputA[1, 1], inputA[2, 1], inputP[1, 1], inputP[2, 1], inputP[3, 1]]);
F := Matrix(5, 1, [A[1, 1], A[2, 3], P[1, 1], P[2, 1], P[3, 1]]);
f := Matrix(5, 1, [F(1)-inputs(1), F(2)-inputs(2), F(3)-inputs(3), F(4)-inputs(4), F(5)-inputs(5)]);
#bước tịt ngúm
with(MTM); J := jacobian(f, Q);//tính ma trận đạo hàm riêng
combine(J); combine(Determinant(J))//cài này bằng không này
Được sửa bởi whatisor ngày Thu Oct 22, 2009 9:44 pm; sửa lần 1.
whatisor- Lớp 11
Trang 1 trong tổng số 3 trang • 1, 2, 3 ![]()
|
|
|